



Stampa/Stapila Roboto SDCX RMD-300/200/160/120/35/08/110/20/50
Teknikaj Parametroj
| Modelnumero | Grado de Libereco | Veturreĝimo | Utila ŝarĝo (KG) | Ripetata poziciiga precizeco (mm) | Movamplekso (°) | Maksimuma rapideco (°/s) | Permesebla ŝarĝinercio de pojno (kg·m2) | Cirkla ritmo (ciklo/horo) | Radiuso de moviĝo (mm) | Loka Pezo (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC-servomotoro | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 10003 | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC-servomotoro | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 13003 | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC-servomotoro | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 15003 | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC-servomotoro | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 15603 | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC-servomotoro | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 17002 | 2040 | 660 |
| SDCX-RMD20 | 4 | AC-servomotoro | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | AC-servomotoro | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800① | 1433 | 180 |
Rimarkoj:
① La testtrako estas 150mm alta kaj 1000mm larĝa, kaj la efektiva ciklotempo estas influita de la efektivaj laborkondiĉoj;
② La testtrako estas 200mm alta kaj 1000mm larĝa, kaj la efektiva ciklotempo estas influita de la efektivaj laborkondiĉoj;
③ La testtrako estas 400mm alta kaj 2000mm larĝa, kaj la efektiva ciklotempo estas influita de la efektivaj laborkondiĉoj;
Evitu kontakton kun brulemaj, eksplodemaj kaj korodaj gasoj kaj likvaĵoj; Ne ŝprucigu per akvo, oleo kaj polvo; Tenu for de elektraj bruofontoj (plasmo)
Movamplekso
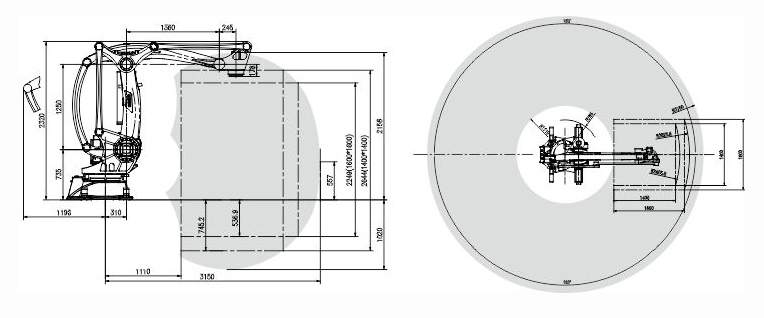
Intrigo de Moviĝa Amplekso por SDCX-RMD300/200/160/120
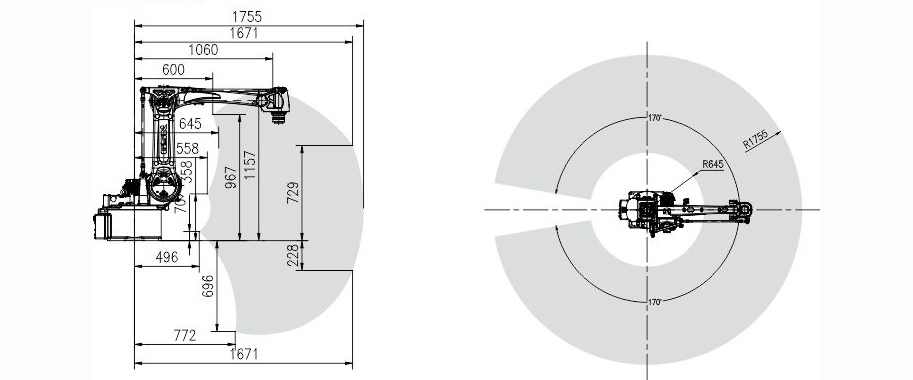
Intrigo de Moviĝa Amplekso por SDCX-RMD20
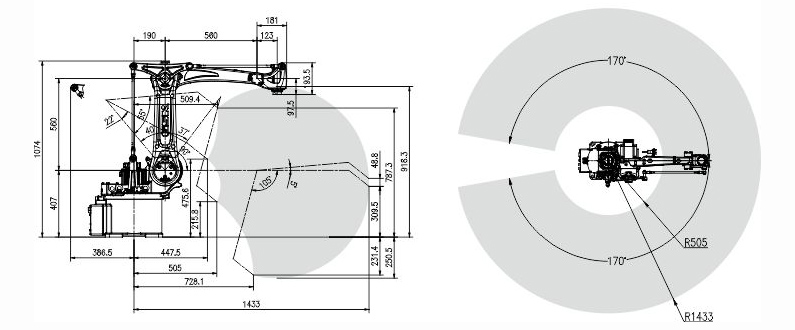
Intrigo de Moviĝa Amplekso por SDCX-RMD08
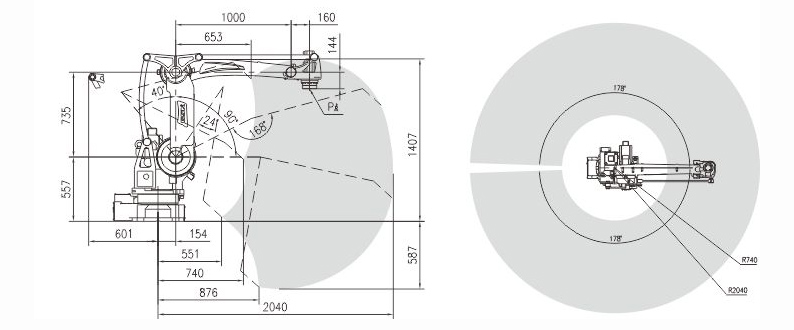
Intrigo de Moviĝa Amplekso por SDCX-RMD50
Produkta Aplika Montrado
Solvoj
Teknika skemo de projekto pri manipulado de ŝtalaj bobenoj












