ER-Serio Fleksebla Koopera Roboto
Teknikaj Parametroj
| ER3 | ER7 | ER3 Profesiulo | ER7 Profesiulo | |||||
| Specifo | ||||||||
| Ŝarĝi | 3 kilogramoj | 7 kilogramoj | 3 kilogramoj | 7 kilogramoj | ||||
| Labora radiuso | 760mm | 850mm | 760mm | 850mm | ||||
| Morta pezo | Ĉirkaŭ 21 kg | Ĉirkaŭ 27 kg | Ĉirkaŭ 22 kg | Ĉirkaŭ 29 kg | ||||
| Grado de Libereco | 6 rotaciaj artikoj | 6 rotaciaj artikoj | 7 rotaciaj artikoj | 7 rotaciaj artikoj | ||||
| MTBF | >35000 horoj | >35000 horoj | >35000 horoj | >35000 horoj | ||||
| Elektroprovizo | DC 48V | DC 48V | DC 48V | DC 48V | ||||
| Programado | Trena instruado kaj grafika interfaco | Trena instruado kaj grafika interfaco | Trena instruado kaj grafika interfaco | Trena instruado kaj grafika interfaco | ||||
| Elfaro | ||||||||
| POTENCO | Meza | Pinta valoro | Meza | Pinta valoro | Meza | Pinta valoro | Meza | Pinto |
| KONSUMO | 200vatoj | 400vatoj | 500vatoj | 900vatoj | 300vatoj | 500vatoj | 600vatoj | 1000 vatoj |
| Sekureco | > 22 Alĝustigeblaj Sekurecaj Funkcioj | > 22 Alĝustigeblaj Sekurecaj Funkcioj | > 22 Alĝustigeblaj Sekurecaj Funkcioj | > 22 Alĝustigeblaj Sekurecaj Funkcioj | ||||
| Atestado | Konformas al la normo "EN ISO 13849-1, Kategorio 3, PL d, EU CE-Atestado" | Konformas al la normo "EN ISO 13849-1, Kategorio 3, PL d, EU CE-Atestado" | Konformas al la normo "EN ISO 13849-1, Kategorio 3, PL d, EU CE-Atestado" | Konformas al la normo "EN ISO 13849-1, Kategorio 3, PL d, EU CE-Atestado" | ||||
| Fortosensado, iloflanĝo | forto, XyZ | Momento de forto, XyZ | Forto, xyZ | Momento de forto, XyZ | Forto, xyZ | Momento de forto, XyZ | Forto, xyZ | Momento de forto, xyz |
| Rezolucia proporcio de fortomezurado | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm |
| Relativa precizeco de fortkontrolo | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm |
| Alĝustigebla intervalo de kartezia rigideco | 0~3000N/m, 0~300Nm/radiano | 0~3000N/m, 0~300Nm/radiano | 0~3000N/m, 0~300Nm/radiano | 0~3000N/m, 0~300Nm/radiano | ||||
| Gamo de funkcianta temperaturo | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| Humideco | 20-80%RH (ne-kondensanta) | 20-80%RH (ne-kondensanta) | 20-80%RH (ne-kondensanta) | 20-80%RH (ne-kondensanta) | ||||
| 180°/s | ||||||||
| 180°/s | ±0,03 mm | ±0,03 mm | ±0,03 mm | ±0,03 mm | ||||
| 180°/s | Amplekso de laboro | Maksimuma rapideco | Amplekso de laboro | Maksimuma rapideco | Amplekso de laboro | Maksimuma rapideco | Amplekso de laboro | Maksimuma rapideco |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Akso 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Akso 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Akso 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Akso 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Akso 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Akso 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Maksimuma rapideco ĉe la ilofino | ≤3m/s | ≤2.5m/s | ≤3m/s | ≤2.5m/s | ||||
| Trajtoj | ||||||||
| IP-protekta grado | IP54 | IP54 | IP54 | IP54 | ||||
| ISO Pura Ĉambra Klaso | 5 | 6 | 5 | 6 | ||||
| Bruo | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Robota muntado | Formale muntita, inverse muntita, flank-muntita | Formale muntita, inverse muntita, flank-muntita | Formale muntita, inverse muntita, flank-muntita | Formale muntita, inverse muntita, flank-muntita | ||||
| Ĝeneraluzebla I/O-Pordo | Cifereca Enigo4 | Cifereca Enigo 4 | Cifereca Enigo 4 | Cifereca Enigo 4 | ||||
|
| Cifereca Eligo4 | Cifereca Eligo 4 | Cifereca Eligo4 | Cifereca Eligo 4 | ||||
| Sekureca I/O-Pordo | Ekstera krizhaltigo 2 | Ekstera krizhaltigo2 | Ekstera krizhaltigo 2 | Ekstera krizhaltigo2 | ||||
|
| Ekstera sekureca pordo2 | Ekstera sekureca pordo 2 | Ekstera sekureca pordo 2 | Ekstera sekureca pordo 2 | ||||
| Ilo-Konektila Tipo | M8 | M8 | M8 | M8 | ||||
| Ilo I/O Elektroprovizo Provizo | 24V/1A | 24V/1A | 24V/1A | 24V/1A | ||||
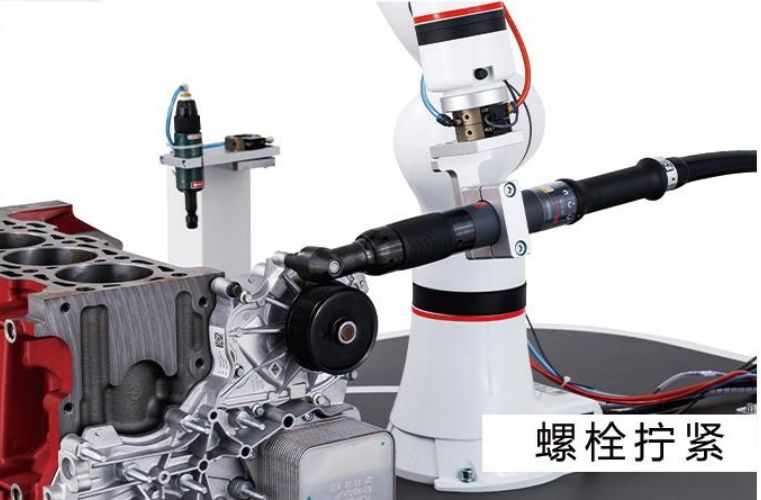
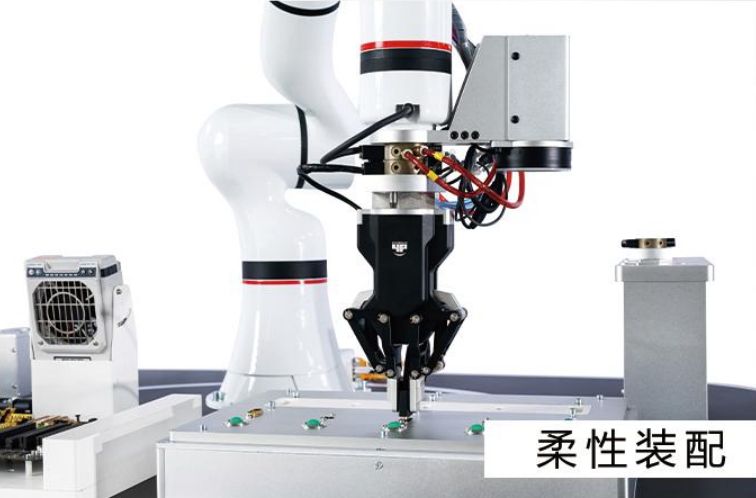
Industriaj aplikoj
Flekseblaj Kunlaboraj Robotoj de XMate taŭgas por diversaj procezaj aplikoj, inkluzive de fleksebla muntado, ŝraŭbŝlosado, inspektado kaj mezurado, transportado, forigo de gluo sur materialoj, prizorgado de ekipaĵo, ktp. Ili povas helpi entreprenojn de ĉiuj grandecoj plibonigi produktivecon kaj atingi flekseblan aŭtomatigon.